The related work can be summarized into three parts:
1. Overview of Direct Methods in SLAM
2. Introduction to LIVO
3. Development Timeline of LIVO (Note: The timeline is based solely on works mentioned in this paper. Given the author’s limitations, some relevant work may inevitably be overlooked.)
1. Overview of Direct Methods
A comparative analysis between feature-based and direct methods is presented. Classification of Visual Direct Methods:
- Dense Direct Methods (all pixels):
Typically applied to RGB-D cameras. Examples include:- “Real-time dense visual tracking under large lighting variations”
- “Direct iterative closest point for real-time visual odometry”
- “Robust odometry estimation for RGB-D cameras”
- Semi-dense Direct Methods (pixels with significant grayscale gradients):
Examples include:- “LSD-SLAM: Large-scale direct monocular SLAM”
- “Semi-dense visual odometry for a monocular camera”
- Sparse Direct Methods (image patches):
Based on carefully selected image patches. Examples include:- “Direct sparse odometry”
- “SVO: Fast semi-direct monocular visual odometry”
Direct Methods in LiDAR:
There is no explicit categorization. Typically involves downsampling scans and establishing point-to-plane constraints. Representative works include:
- “FAST-LIO2: Fast direct lidar-inertial odometry”
- “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry”
- “Direct lidar-inertial odometry: Lightweight LIO with continuous-time motion correction”
- “D-LIOM: Tightly-coupled direct lidar-inertial odometry and mapping” Direct Methods in FAST-LIVO2:
- For the LiDAR module: utilizes methods from “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry” (Note: manages voxel maps using hash tables and octrees).
- For the visual module: adopts “SVO: Fast semi-direct monocular visual odometry” (Note: employs a sparse direct method to compute the Jacobian matrix of photometric error relative to pose perturbations. FAST-LIVO2 differs from SVO in terms of coordinate systems and thus requires an additional processing step—details available in code analysis).
2. Introduction to Multi-sensor Fusion SLAM
(Note: This section is highly recommended for quickly grasping relevant LIVO research.)
The authors classify existing LIVO methods into two categories: loosely-coupled and tightly-coupled. The classification is mainly based on two criteria:
-
State Estimation:
Whether the estimation result from one sensor is included as an optimization target within another sensor’s model. -
Raw Measurement Integration:
Whether raw data from different sensors are directly combined.
3. Development Timeline of LIVO
First, according to the classification standards in Section 2, all existing LIVO methods are categorized as shown below:
 Figure 1: LIVO Development Timeline
Figure 1: LIVO Development Timeline
Loosely-coupled Methods: Discussed from the aspects of states and measurements, illustrated as follows:
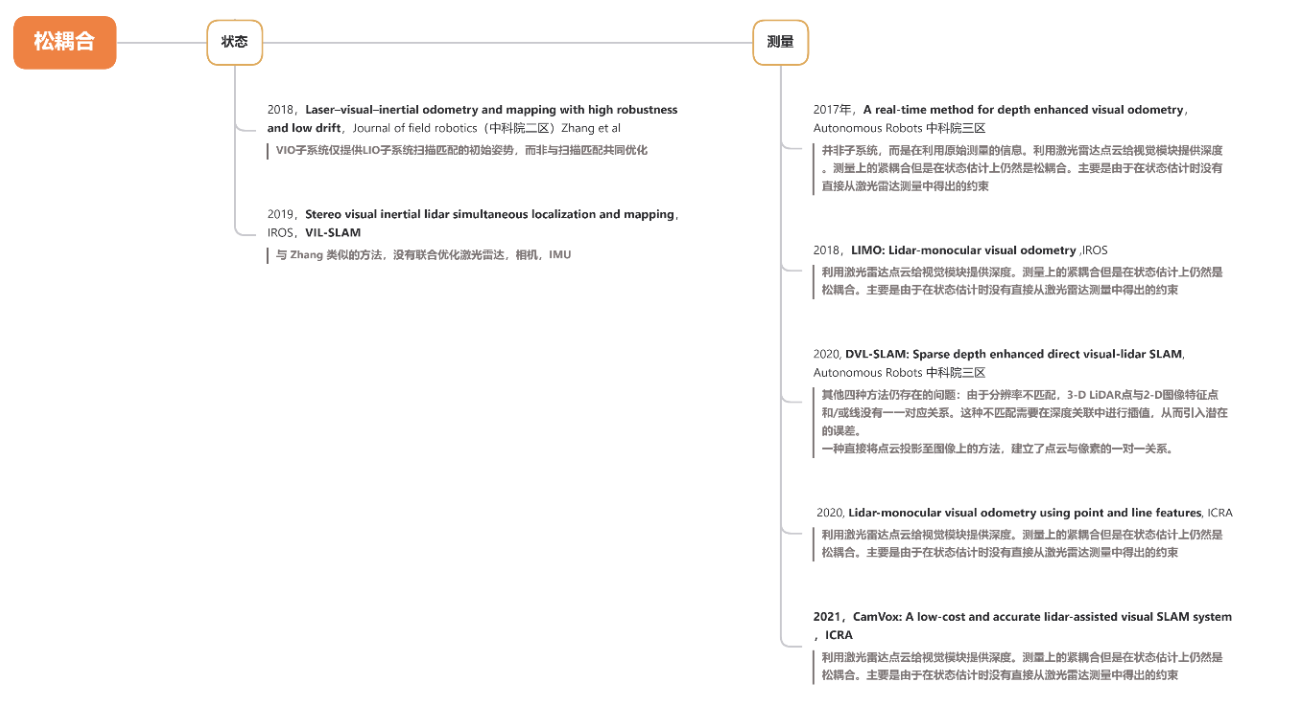 Figure 2: Timeline of Loosely-coupled Methods (not included here, referenced from the original text).
Figure 2: Timeline of Loosely-coupled Methods (not included here, referenced from the original text).
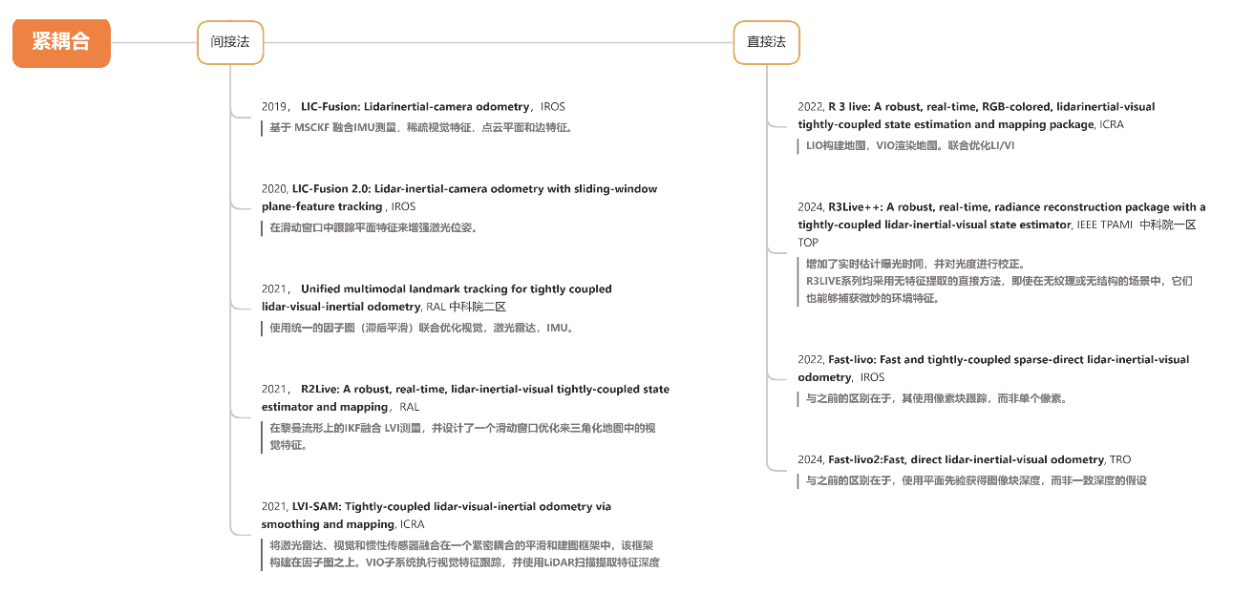
Tightly-coupled Methods: The paper discusses these methods from two perspectives: indirect methods and direct methods.
Next Section: 4. System Overview